
به گزارش ایسنا و به نقل از تلگراف، بیشتر رباتهای انساننما با استفاده از اصول مهندسی طراحی میشوند که در نتیجه بسیار سفت و سنگین هستند و حرکت آنها بسیار دشوار است.
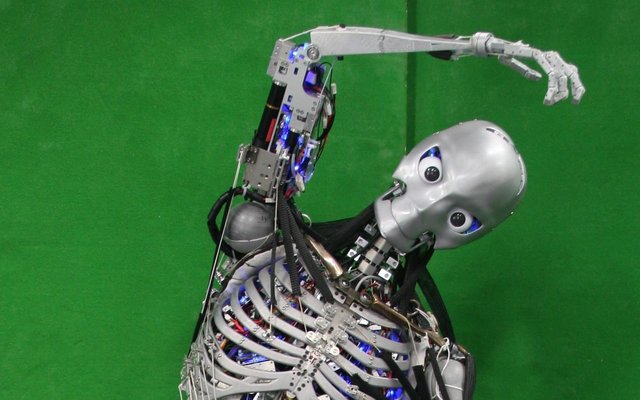
در حال حاضر گروهی از دانشگاه توکیو رباتهای انساننمایی به نام Kengoro و Kenshire بر اساس نحوه عملکرد بدن انسان ساختهاند. این رباتها بر اساس سیستم عضلانی اسکلتی با آلومینیوم، فولاد و پلاستیک ساخته شدهاند و حتی دارای تاندونها و مفاصل مصنوعی هستند.
این رباتها دارای قفسه سینه و ستون فقرات مفصلی هستند و همچنین یک سیستم عصبی حسی دارند که به طور مداوم موجب تعادل و ثبات آنها میشود. آنها همچنین توانایی پردازش اطلاعات در مغز را دارند تا بتوانند بدون اینکه بطور خاص به آنها گفته شود چه کاری انجام دهند به طور مستقل عمل کنند.
طراحان این رباتها اظهار کردند: در ساخت آنها از عملکرد بدن انسان الهام گرفته شده است. محققان چگونگی عملکرد بدن انسانها طی ورزش را بررسی و سپس اندامهای مصنوعی با قابلیت حرکت بالقوه را طراحی کردند.
محقق این پروژه “یوکی آسانو” گفت: حدود دو سال برای طراحی این رباتها بر اساس عملکرد انسانی کار کردیم. با وجود محدودیتهای انسانهای معمولی نیز بر اساس نظریههای مهندسی متداول مکانیک، الکترونیک و پردازش اطلاعات ساخته شدهاند.
وی در ادامه افزود: هدف ما طراحی ساختار انسان بر اساس سیستمهای انسانی از جمله ساختار اسکلتی عضلانی، سیستم عصبی حسی و روش پردازش اطلاعات در مغز است.
این گروه تحقیقاتی رباتهای اسکلتی عضلانی را با موفقیت طراحی کردند. آنها ساختار عضلانی اسکلتی انسان را تقلید کردند، به طوریکه دارای بدن انعطافپذیر بوده و با استفاده از تسمههای محرک حرکات بدن انسان را تقلید میکنند.
Kengoro و Kenshire به طور کامل حرکات انسانی را تقلید میکنند. این دو ربات با توجه به تناسب بدن، ساختار اسکلتی، تنظیم عضلات و عملکرد مفاصل طراحی شده و در واقع ربات انساننما هستند.
مهندسان، شکل و طول استخوانها را اندازهگیری کردند تا اسکلت انسانی پنج فوتی دو اینچی را طراحی کنند. این رباتها حتی وزنی معادل یک انسان دارند.
عضلات مصنوعی از موتورهای الکتریکی، سیم و سنسور ساخته شدهاند و دارای دست و پاهایی با پنج انگشت هستند تا مانند عضلات و انگشتان انسان خم شوند. اتصالات توپی و سوکتی ایجاد شده طیف وسیعی از حرکات را که هرگز در رباتهای پیشین نبوده است فراهم کردهاند.
ستون فقرات با مهرههای منفرد ساخته شده تا دارای انحنای طبیعی بوده و ربات قادر به نشستن و خم و راست شدن باشد. چندین قسمت از بدن رباتها با استفاده از چاپ سهبعدی همانند بدن انسان ساخته شده است.
وی گفت: ما هنوز در ابتدای راهی طولانی برای ایجاد یک ربات انساننمای هوشمند با قابلیت رفتار انسانی هستیم.
نتایج این تحقیق در نشریه Science Robotics منتشر شده است.






دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.