
به گزارش ایسنا و به نقل از ساینسدیلی، در حالی که مهندسان در ساخت رباتهای کوچک حشره مانند موفق بودند و به برنامه نویسی آنها ادامه میدهند تا رباتهای دقیقاً مانند حشرات خلق کنند، جمعی از مهندسان کورنل روی برنامه نویسی جدیدی کار کردهاند که براساس آن ربات با تقلید از مغز حشرات کار میکند.
با این روند روزی فرا خواهد رسید که مردم متوجه نخواهند شد که آیا یک حشره روی دیوار واقعی است یا یک ربات.
حجم پردازشهای کامپیوتری که یک ربات برای حس وزش باد با استفاده از میلههای فلزی کوچک که روی بالهای آنها به کار گذاشته میشود و مسیریابی هنگام فرود روی یک گل نیاز دارد، به قدری است که باید یک کامپیوتر دسک تاپ را پشت خود حمل کند، حال سیلویا فراری استاد مکانیک و مهندس هوافضا و رئیس آزمایشگاه سیستمهای کنترل هوشمند میگوید: تراشههای رایانهای نورومورفیک در حال ظهور هستند تا بار این حشرات کاهش پیدا کند.
برخلاف تراشههای سنتی که ترکیبی از صفرها و یکها را به عنوان کد دوتایی پردازش میکنند، تراشههای نورومورفیک همانند نورونهای عصبی جریان الکتریکی در ترکیبات پیچیده را پردازش می کنند.
آزمایشگاه سیلویا فراری در حال توسعه کلاس جدیدی از الگوریتمهای کنترلگر و حسگر “موقعیت محور” است که فعالیت عصبی را تقلید میکنند و میتوانند بر روی تراشههای نورومورفیک اجرا شوند.
به دلیل اینکه این تراشهها به نیروی کمتری نسبت به پردازندههای سنتی نیاز دارند، این امر به مهندسین اجازه میدهد محاسبات بیشتری را انجام دهند.
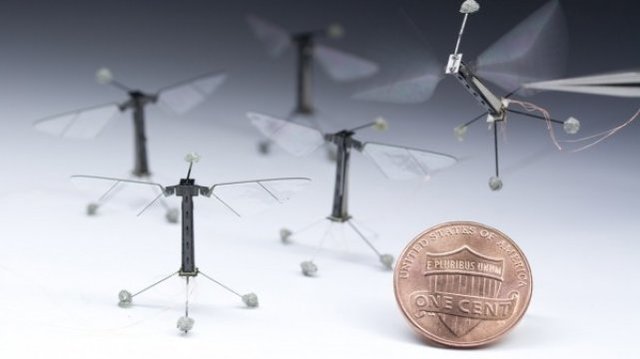
آزمایشگاه فراری با آزمایشگاه میکروروبوتیک هاروارد که یک ربات کوچک ۸۰ میلی گرمی مجهز به سنسور بصری و حرکتی طراحی کرده است، همکاری میکند. در حالی که این ربات هماکنون با نیروی برق کار میکند محققان هاروارد در پی حذف این وابستگی با یک منبع نیروی جدید هستند.
الگوریتم کورنل به ساخت رباتهای کوچک، کم وزن و مستقل و سازگارتر با محیطهای پیچیده کمک خواهد کرد.






دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.